Bonjour,
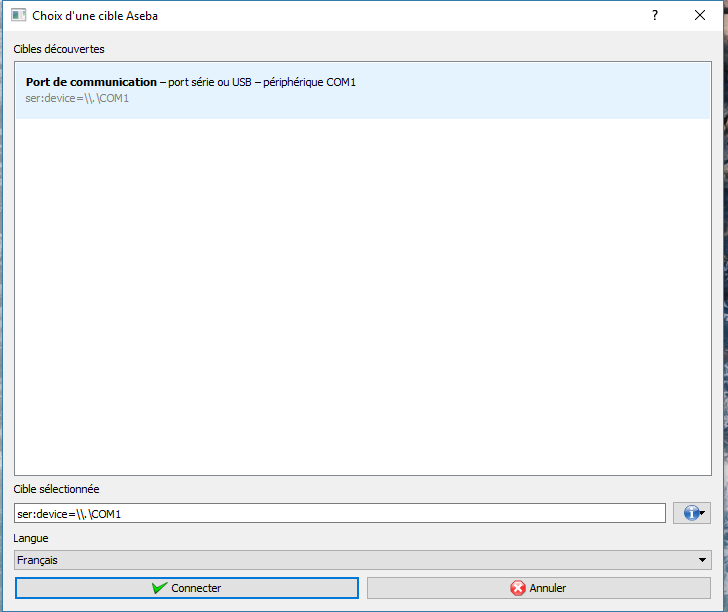
Voici ce que je vois quand je lance Aseba Studio, en précisant que je n’ai pas de Thymio ( ou pas encore  donc j’aimerais pouvoir utiliser la simulation.
donc j’aimerais pouvoir utiliser la simulation.
Cordialement

Bonjour,
Voici ce que je vois quand je lance Aseba Studio, en précisant que je n’ai pas de Thymio ( ou pas encore donc j’aimerais pouvoir utiliser la simulation.
Bonjour,
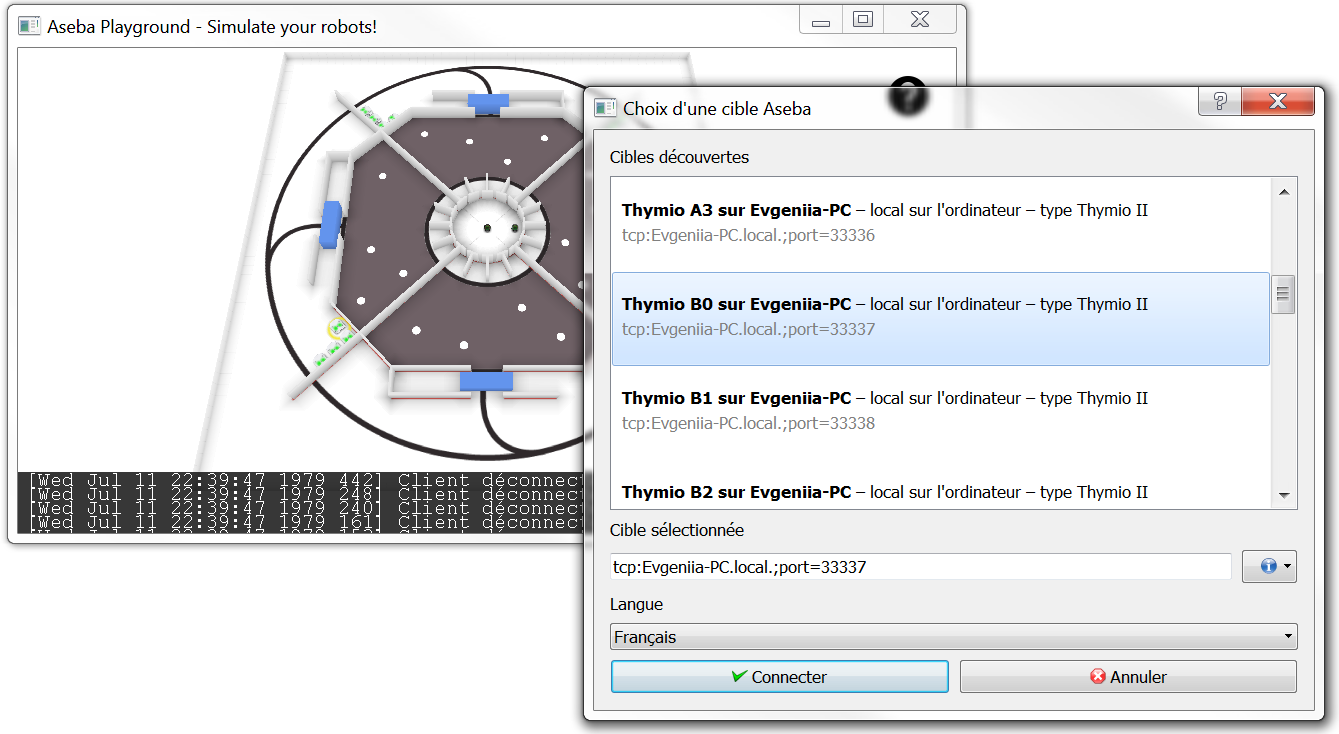
Est-ce que vous fermez la fenêtre d’Aseba Playground avant d’ouvrire VPL (ou Aseba Studio) ou contraire ?
Normallement, si deux logiciels sont ouverts en même temps, vous verrez tous les robots virtuels dans la liste (même si vous n’avez pas du tout un robot réel) :
Si cela ne fonctionne pas toujours, envoyez-moi, s’il vous plaît, un « printscreen » de ces deux logiciels ouverts en même temps. Cela pourrait nous aider.
Merci d’avance pour votre réponse
Bonjour Genia_B,
Votre message m’a bien guidé : j’ai ouvert Aseba Playground PUIS Aseba Studio. J’ai attendu environ 30 secondes avant de voir apparaître la liste des robots.Après sélection d’un robot, la fenêtre de programmation est apparue.
Merci pour votre aide 
Hugs
bonjour,
dans la séquece 5.2(découvrir l’interface d’aseba studio) .Le code proposé ne marche pas, le compilateur renvoie l’erreur suivante
voici le code:
var i = 0
var n = 3
call leds.circle(32, 0, 32, 0, 32, 0, 32, 0)
onevent tap # taper le robot ou le poser brusquement
for i in 0:n do
call sound.freq(440+50*i, 60) # joue les 4 notes de fréquence 440, 490, 540, 590 Hz
end
voici l’erreur:
error at Line: 5 Col: 18 : la constante « n » n’est pas définie
Bonjour, j’ai une question ou remarque à propos du Quizz 5-01 Q1.
le mot clé tap :
a) envoie une information de Studio à Thymio
b) envoie une information de Thymio à Studio.
Je ne comprends pas ces choix. Je pensais que ce mot clé servait seulement à identifier un type d’évènement et non à activer une communication dans un sens ou dans l’autre.
Une fois le programme compilé il est chargé et exécuté dans le thymio. Si je ferme le logiciel Aseba Studio, le robot continue de fonctionner. Rien ne sera échangé entre Thymio et Studio. La question me parait mal formulée mais peut être que je n’ai rien compris.
D’une manière générale je trouve que le vocabulaire est inapproprié.
Dans le même QUizz, à la question 3 vous dites : La variable motor.left.target peut envoyer des valeurs au robot si on la modifie dans l’inspecteur .
Ne serait-il pas plus correct de dire : Studio peut envoyer des valeurs au robot en modifiant la valeur de la variable motor.left.target dans l’inspecteur ? La variable en elle même n’agit pas.
Je sais que ça parait pointilleux mais un vocabulaire très précis me semble indispensable pour bien comprendre
Pouvez vous préciser tout cela ?
Merci
Bonjour,
L’erreur vient du fait que Aseba attend une constante dans la boucle for. Or n est déclaré comme une variable.
Solution

Il est évident que l’on cache beaucoup de choses en simplifiant le discours, et ça se traduit par un manque de rigueur formel. S’ adressant plutôt à des débutant, l’ important est de comprendre la différence entre les mots clé qui traduisent un transfert d’information dans un sens ou dans l’autre.
Je crains qu’ un langage trop abscond ne favorise pas nécessairement la compréhension.
Bien à vous,
Bonjour
Avec l’utilisation du simulateur, comment simuler les touches du Thymio ?
J’essaye de cliquer dessus ou d’utiliser les touches du clavier mais rien ne se passe.
Tous semble bien installé car je peux programmer le Thymio.
Cordialement
Bonjour PBonam,
Si tu double cliques sur Thymio dans le playground, n’as tu pas accès aux boutons ?
Cordialement
Bonjour Wire68
Non, il ne se passe rien.
Bonjour PBonam,
Je ne suis pas encore au chap.5 mais j’ai fait un petit essai et chez moi Thymio bouge et peut être commandé par ses boutons.
1/ J’ai ouvert thymio.playground
2/ J’ai récupéré un prg que j’avais écrit en VPL. Si tu n’as pas de prg VPL je te conseille d’en écrire un en VPL qui utilise les boutons Thymio, sauf si tu connais le langage. Je te joins mon prg très simple qui fonctionne.
3/ Il faut charger le prg dans Thymio (en haut à gauche dans Aseba studio)
4/ Il faut exécuter le prg (en haut à gauche dans Aseba studio)
5/ Double cliquer sur Thymio dans le playground
6/ Appuyer sur le boutons : ça marche ou pas !
Voila le prg que j’ai écrit : essaye le copiercoller
Je vois une zone grisée dans la partie image du prg alors je complète pour te dire où le prg commence et où il s’arrête.
Le prg commence avec # reset outputs qui doit remplacer le reset output du texte que tu lis.
La 2ème ligne call sound.system(-1)
…
Le prg se termine avec end.
call sound.system(-1)
call leds.top(0,0,0)
call leds.bottom.left(0,0,0)
call leds.bottom.right(0,0,0)
call leds.circle(0,0,0,0,0,0,0,0)
onevent buttons
when button.forward == 1 do
motor.left.target = 50
motor.right.target = 50
emit pair_run 0
end
when button.backward == 1 do
motor.left.target = -50
motor.right.target = -50
emit pair_run 1
end
when button.left == 1 do
motor.left.target = -50
motor.right.target = 50
emit pair_run 2
end
when button.right == 1 do
motor.left.target = 50
motor.right.target = -50
emit pair_run 3
end
when button.center == 1 do
motor.left.target = 0
motor.right.target = 0
emit pair_run 4
end
Bonne conduite de Thymio
J’ai repris le prg pour essayer d’être plus clair.
J’ai mis le # entre 2 " qu’il faut supprimer en l’injectant dans Aseba studio (c’est le # qui change les attributs de la police de caractère de nomal vers gras).
« # » reset outputs
call sound.system(-1)
call leds.top(0,0,0)
call leds.bottom.left(0,0,0)
call leds.bottom.right(0,0,0)
call leds.circle(0,0,0,0,0,0,0,0)
onevent buttons
when button.forward == 1 do
motor.left.target = 50
motor.right.target = 50
emit pair_run 0
end
when button.backward == 1 do
motor.left.target = -50
motor.right.target = -50
emit pair_run 1
end
when button.left == 1 do
motor.left.target = -50
motor.right.target = 50
emit pair_run 2
end
when button.right == 1 do
motor.left.target = 50
motor.right.target = -50
emit pair_run 3
end
when button.center == 1 do
motor.left.target = 0
motor.right.target = 0
emit pair_run 4
endBonjour,
Concerne quiz chap 5.2
QUESTION 3 (3 points possibles)
a. Par quelle variable interne doit-on remplacer prox.ground.delta pour transformer le programme du projet « Thymio atterrit » (visible dans la solution de l’exercice) en détecteur de d’approche ?
Thymio n’est il pas déjà un détecteur d’approche verticale ?
Peut être faut il changer l’axe de déplacement en choisissant une autre direction ?
Merci
Merci Wire68, j’ai finalement trouvé le problème.
J’utilisais un PC virtuel (VmWare) pour lancer Aseba, et le double clic sur le Thymio du simulateur ne marche pas.
En l’installant sur un PC réel, ça marche.
Bonjour,
Concerne quiz chap 5.03 question 6
Les consignes données dans cet exercice ne sont pas assez nombreuses à mon avis pour obtenir de la part d’un élève une réponse binaire oui ou non.
En effet, en fonction des consignes de vitesse données initialement par programmation en VPL le comportement du Thymio virtuel n’est pas le même. Avec un peu plus de puissance dans les roues il est capable de « déplacer » des montagnes (suisses).
Une seule condition pour arriver à faire bouger Thymio est de l’aider à démarrer en le déplaçant physiquement de manière virtuelle sur la surface de jeu. Cette autorisation ou non manque dans vos consignes à mon avis, mais en même temps cette consigne deviendrait un indice pour répondre !
On peut aussi déplacer l’obstacle et le placer devant le nez de Thymio, est ce prévu ?
Ces consignes ne doivent pas forcement venir des équipes pédagogiques et techniques de ce mooc mais peuvent être développées par les personnels enseignants ou autres qui utilisent ce moyen de formation pour enseigner.
Cordialement
Bonjour,
Cette question a été crée dans le but de demander aux répondants soit d’analyser bien l’environnement et le code, soit de tester directement ce programme avec la carte r2t2-practice.playground pour voir les résultat et ensuite choisir la réponse. Cela nous permet aussi de savoir si les participants ont bien compris comment lancer le simulateur et travailler avec. Vu, que le simulateur et le même pour toutes et tous, alors on peut dire que le résultat dans sera le même (si, pas changer le programme proposé dans la question, bien sûr).
Concernant le déplacement physique de Thymio simulé, si répéter exactement les mêmes lignes du code, Thymio commence à bouger sans cet aide grâce à la première ligne du code.
On peut déplacer des obstacles sur certains cartes du simulateur (cliquer une fois sur l’objet que vous voudriez déplacer, cliquer et le glisser pour le déplacer) :
J’espère que ma réponse a répondu à vos attentes
Bonne journée
A la réflexion, l’ énoncé n’ est pas assez clair. Je vais préciser que Thymio est supposé rouler sur une surface horizontale.
Bonjour @jorivet,
Le mot horizontal évitera toute ambiguïté de la part des élèves mais donnera directement la réponse.
J’essayerai plutôt : Par quelle variable interne doit on remplacer prox.ground pour éviter à Thymio une collision frontale lorsqu’il circule sur une voie de communication ?
Pour semer le doute et faire réfléchir les élèves vous pouvez rajouter « sur une voie de communication inclinée » et proposer en réponse l’inclinomètre aussi.
Cordialement
Bonjour.
Je n’ai pas de robot et je souhaitais utiliser le simulateur. Je viens de lire tous les posts du forum et d’essayer tout ce qui est proposé sur le sujet. Je suis toujours bloqué.Voici ma situation: j’ai mon simulateur Aseba playground d’un côté et le logiciel scratch 3.0 de l’autre. Je ne sais pas comment relier les deux. Autrement dit, lorsque j’ai mis les blocs de programme sur scratch, comment remplacer le chat par le robot?
Je viens d’arriver à la section 5 et je n’ai pas encore mis en application concrète les différents programmes.
En ce qui concerne la programmation texte, je ne vois pas non plus où écrire le texte.
Merci pour votre aide.
Cordialement.
Jean
Merci pour votre aide
Bonjour @gateauje
As tu lancé le bon fichier qui fonctionne avec scratch, thymio-challenge-pack-web-bridge.playground ?
Bonne simulation
Bonjour wire68. Merci de t’intéresser à mon problème. Oui, j’ai bien lancé le bon fichier. C’est lui qui me donne le simulateur. Malheureusement je ne sais pas faire le lien avec scratch qui est ouvert de son côté. C’est bien aussi la bonne version de scratch, celle qui était proposée et dans laquelle j’ai mis l’extension thymio.
Bonne soirée.
Jean